[T11] Esercitazione 11
Istruzioni per l’esercitazione:
- Aprite il form di consegna in un browser e loggatevi con le vostre credenziali
uniroma1. - Scaricate e decomprimete sulla scrivania il codice dell’esercitazione. Vi sarà una sotto-directory separata per ciascun esercizio di programmazione.
Non modificate in alcun modo i programmi di test
*_main.c. - Rinominare la directory chiamandola
cognome.nome. Sulle postazioni del laboratorio sarà/home/studente/Desktop/cognome.nome/. - È possibile consultare appunti/libri e il materiale didattico online.
- Rispondete alle domande online sul modulo di consegna.
- Finiti gli esercizi, e non più tardi della fine della lezione:
- zippate la directory di lavoro in
cognome.nome.zip(zip -r cognome.nome.zip cognome.nome/).
- zippate la directory di lavoro in
- Per consegnare:
- inserite nel form di consegna come autovalutazione il punteggio di ciascuno dei test forniti (inserite zero se l’esercizio non è stato svolto, non compila, o dà errore di esecuzione).
- fate upload del file
cognome.nome.zip. - importante: verificate di aver ricevuto mail di conferma per la sottomissione del form
- Se siete in laboratorio, prima di uscire:
- importante: fate logout dal vostro account Google!
- eliminate dal desktop la directory creata (
rm -rf cognome.nome). - rimettete a posto eventuali sedie prese all’ingresso dell’aula!
Per maggiori informazioni fate riferimento al regolamento delle esercitazioni.
Esercizio 1 (suffisso di una stringa)
Tradurre in IA32 la seguente funzione is_suffix definita in E1-is-suffix/e1.c che, date due stringhe s1 e s2, verifica se la s1 è un suffisso di s2. Ad esempio ger è suffisso di hamburger, mentre gur non lo è.
e1.c
int is_suffix(const char* s1, const char* s2){
const char *s1_aux = s1;
const char *s2_aux = s2;
while (*s1_aux++);
while (*s2_aux++);
while (s1 != s1_aux && s2 != s2_aux && *(--s1_aux) == *(--s2_aux));
return s1 == s1_aux && *s1_aux == *s2_aux;
}
Scrivere la soluzione nel file E1-is-suffix/e1.s. Usare il file E1-is-suffix/e1_eq.c per sviluppare la versione C equivalente e E1-is-suffix/e1_main.c come programma di prova.
Esercizio 2 (indicatore di progresso)
Si vogliono usare i segnali per creare un indicatore di progresso per la funzione do_sort, che implementa un semplice algoritmo di ordinamento a bolle. L’indicatore di progresso è la percentuale di n coperta da i, vale a dire 100.0*i/n. Si scriva la soluzione nel file E2-sort-timer/e2.c modificandolo e aggiungendo quanto necessario al raggiungimento dell’obiettivo.
e2.c
#include "e2.h"
static void do_sort(int *v, int n) {
int i, j;
for (i=0; i<n; ++i)
for (j=1; j<n; ++j)
if (v[j-1] > v[j]) {
int tmp = v[j-1];
v[j-1] = v[j];
v[j] = tmp;
}
}
void sort(int *v, int n) {
// completare con gestione segnali...
do_sort(v, n);
}
Il risultato atteso deve essere come segue (ovviamente i numeri esatti delle percentuali possono variare):
start sorting...
-------------------------------
5.4%
11.2% <---- percentuali stampate dal gestore del segnale
17.1%
23.3%
29.7%
36.5%
43.7%
51.5%
59.7%
68.7%
79.0%
90.7%
-------------------------------
v[0]=0
v[1]=1
v[2]=2
v[3]=3
v[4]=4
v[5]=5
v[6]=6
v[7]=7
v[8]=8
v[9]=9
Suggerimento: rendere la variabile i di do_sort globale (dichiarata fuori dalla funzione) e tenere in un’altra variabile globale max il valore di n. In questo modo è possibile accedervi da un handler di un segnale che può stampare il rapporto tra i e max. Fare riferimento alla dispensa del corso sul segnali.
Esercizio 3 (Domande)
Domanda 1 Quale tra le seguenti affermazioni è VERA?
- A. Una “trap” è un tipo di interruzione asincrona
- B. Una “trap” viene generata, ad esempio, quando si muove il mouse
- C. L’istruzione
intpuò essere usata esclusivamente per invocare le system call - D. L’interrupt generata dal timer è asincrona
- E. Nessuna delle precedenti
Domanda 2 Quale tra le seguenti affermazioni è VERA?
- A. Una system call si invoca con l’istruzione
intseguita da un numero che identifica la system call da eseguire - B. Il valore di ritorno di una system call viene scritto nel registro EAX.
- C. Un programma utente può passare i parametri ad una system call anche copiandoli sullo stack del kernel
- D. Se una system call viene invocata da un programma utente, viene eseguita interamente in user mode
- E. Nessuna delle precedenti
Domanda 3 Dato il seguente codice, quale tra le seguenti affermazione è VERA?
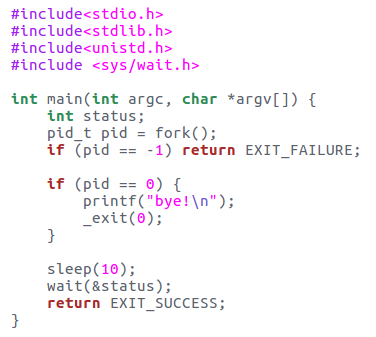
- A. Il processo figlio non entra mai nello stato zombie poiché il padre esegue la
wait - B. Il processo figlio diventa orfano non appena il processo padre termina, e viene quindi adottato (cioè diventa figlio di un altro processo) da un processo antenato (nell’albero dei processi) del processo padre
- C. Il processo figlio entra nello stato zombie dopo aver terminato la propria esecuzione e fino al momento in cui il processo padre raccoglie il suo exit status
- D. Il processo padre termina sicuramente prima del figlio in virtù della chiamata a
wait - E. Nessuna delle precedenti
Domanda 4 Dato il seguente codice, selezionare la risposta corretta:
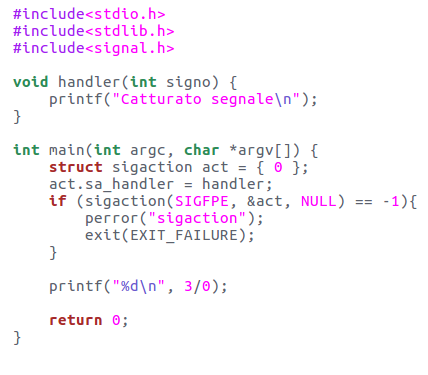
- A. Il programma non termina (o termina dopo molto)
- B. Il programma termina con un core dump
- C. Il programma stampa “Catturato segnale” e poi termina
- D. Il programma stampa “inf” e termina
- E. Nessuna delle precedenti
Domanda 5 Dato il seguente codice, selezionare la risposta corretta:
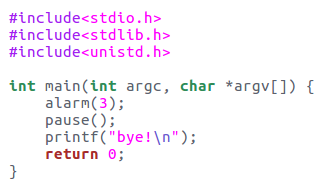
- A. Il programma non termina
- B. Il programma termina dopo circa 3 secondi stampando “bye!”
- C. Il programma termina dopo circa 3 secondi ma non stampa “bye!”
- D. Il programma stampa “bye!” ogni 3 secondi
- E. Nessuna delle precedenti
Domanda 6 Quale delle seguenti affermazioni è FALSA?
- A. Il segnale
SIGKILLnon può essere ignorato né catturato - B. Il segnale
SIGSEGVnon può essere catturato - C. Il segnale
SIGCHLDviene ignorato per default - D. Il segnale
SIGINT, se non catturato o ignorato, causa la terminazione del processo che lo riceve - E. Il segnale
SIGQUIT, se non catturato o ignorato, causa la terminazione del processo che lo riceve
Domanda 7 Quale delle seguenti affermazioni è VERA?
- A. Il comando
kill -9 <pid>invia il segnaleSIGINTal processo con pid<pid> - B. Il segnale inviato col comando
kill -SIGINT <pid>non può essere catturato dal processo con pid<pid> - C.
alarm(s)invia il segnaleSIGALRMognissecondi - D.
ualarm(t, n)invia un segnale dopotmicrosecondi e successivamente ogninmicrosecondi - E. Nessuna delle precedenti
Soluzioni
Esercizio 1 (prefisso di stringa)
e1_eq.c
#include "e1.h"
#include <stdio.h>
int is_suffix(const char* s1, const char* s2){
const char *a = s1;
const char *c = s2;
L1:
if (*a == 0) goto L2;
a++;
goto L1;
L2:
if (*c == 0) goto L3;
c++;
goto L2;
L3:
if (a - s1 == 0) goto E;
if (c - s2 == 0) goto E;
a--;
c--;
char dl = *c;
if (dl - *a != 0) goto E;
goto L3;
E:
if (s1 != a) goto R;
if (*a == *c) return 1;
R:
return 0;
}
e1.s
.globl is_suffix
is_suffix:
movl 4(%esp), %eax
movl 8(%esp), %ecx
L1:
cmpb $0, (%eax)
je L2
incl %eax
jmp L1
L2:
cmpb $0, (%ecx)
je L3
incl %ecx
jmp L2
L3:
cmpl 4(%esp), %eax
je E
cmpl 8(%esp), %ecx
je E
decl %eax
decl %ecx
movb (%ecx), %dl
cmpb (%eax), %dl
jne E
jmp L3
E:
cmpl 4(%esp), %eax
jne R0
movb (%ecx), %dl
cmpb (%eax), %dl
jne R0
movl $1, %eax
jmp R
R0:
xorl %eax, %eax
R:
ret
Esercizio 2 (indicatore di progresso)
e2.c
#include <unistd.h>
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
#include "e2.h"
int i, max;
static void do_sort(int *v, int n) {
int j;
for (i=0; i<n; ++i)
for (j=1; j<n; ++j)
if (v[j-1] > v[j]) {
int tmp = v[j-1];
v[j-1] = v[j];
v[j] = tmp;
}
}
void handler(int sig) {
printf("%3.1f%%\n", 100.0*i/max);
ualarm(500000,0);
}
void sort(int *v, int n) {
max = n;
struct sigaction act = { 0 }; // preparazione struttura
act.sa_handler = handler; // gestore segnale
int ret = sigaction(SIGALRM, &act, NULL); // gestore installato
if (ret == -1) {
perror("sigaction");
exit(EXIT_FAILURE);
}
ualarm(500000,0);
do_sort(v, n);
act.sa_handler = SIG_IGN; // segnale ignorato
ret = sigaction(SIGALRM, &act, NULL); // gestore installato
if (ret == -1) {
perror("sigaction");
exit(EXIT_FAILURE);
}
}
Esercizio 3 (Domande)
- D. L’interrupt generata dal timer è asincrona
- B. Il valore di ritorno di una system call viene scritto nel registro EAX.
-
C. Il processo figlio entra nello stato zombie dopo aver terminato la propria esecuzione e fino al momento in cui il processo padre raccoglie il suo exit status
Spiegazione: quando un processo termina, il kernel libera le risorse associate, ma deve conservarne alcune, come il PCB, per permettere al processo padre di raccogliere l’exit status tramite
wait/waitpid. In questo intervallo di tempo il processo entra in uno stato denominato zombie. Quando il padre raccoglie l’exit status il kernel può rilasciare tutte le risorse associate al figlio, che esce dallo stato zombie e non compare più nella lista dei processi. Se il padre termina senza raccogliere l’exit status del figlio (conwait/waitpid) il processo figlio viene adottato da un processo antenato del processo padre (storicamente init, nei sistemi moderni un discendente di init) che raccoglie l’exit status del figlio permettendo così al kernel di liberare tutte le risorse associate (questi processi vengono detti anche reaper). -
A. Il programma non termina (o termina dopo molto)
Spiegazione: la divisione per zero fa generare alla CPU un FAULT. Il kernel invoca il gestore associato alla divisione per zero e manda il segnale SIGFPE al processo che ha generato il fault per terminarlo (il segnale SIGFPE ha come default la terminazione e la generazione di un core dump). Quando c’è un fault il programma riprende l’esecuzione ripetendo l’istruzione in cui si è generato il fault. Per questo motivo, catturando il segnale SIGFPE il programma non termina.
- C. Il programma termina dopo circa 3 secondi ma non stampa “bye!” [il segnale SIGALRM ha come default la terminazione]
- B. Il segnale SIGSEGV non può essere catturato [gli unici segnali a non poter essere catturati sono SIGKILL e SIGSTOP]
- D.
ualarm(t, n)invia un segnale dopotmicrosecondi e successivamente ogninmicrosecondi [vedi man ualarm]